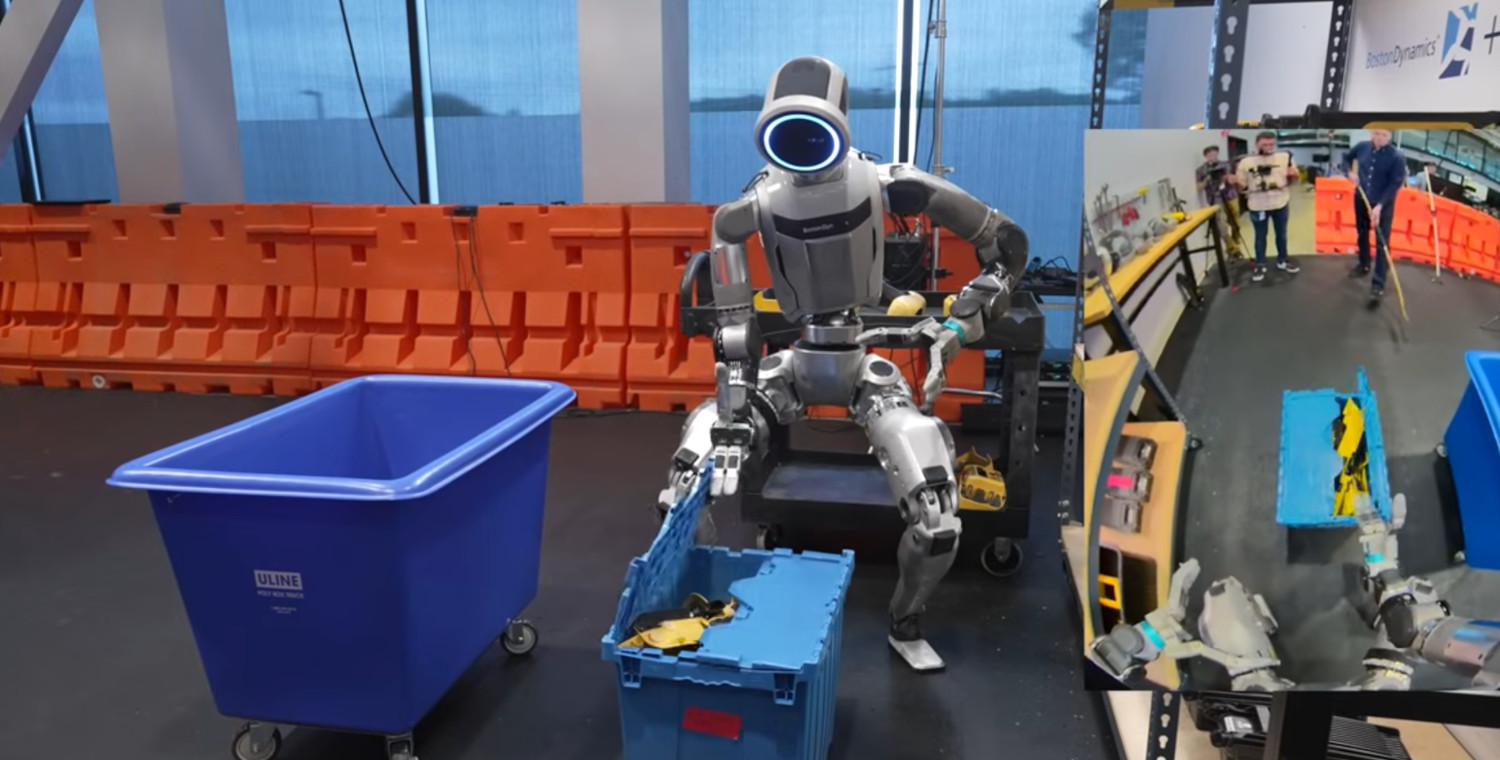
Il y a quelques jours, Boston Dynamics et le Toyota Research Institute ont dévoilé la vidéo du robot humanoïde Atlas en pleine action. Grâce à de « grands modèles de comportement » (large behavior models), il exécute parfaitement une longue séquence continue de tâches complexes combinant manipulation d’objets et déplacements. Il marche, s’accroupit, attrape, soulève, emballe, trie, etc.
Pendant l’expérience, les chercheurs interviennent à plusieurs reprises pour déplacer des objets afin d’obliger l’humanoïde à s’adapter. Celui-ci réussit le test avec brio, déplaçant l’ensemble de son corps et de ses membres de façon totalement adéquate.
Les humanoïdes qui ont déjà démontré cette capacité séparent généralement le contrôle de la marche et de l’équilibre de bas niveau du contrôle des bras pour la manipulation ; ici, un seul modèle comportemental global contrôle l’ensemble du robot, traitant les mains et les pieds de manière presque identique, expliquent les concepteurs.